使用激光扫描头 (LLP) 或 ScanArm 扫描复杂零件表面

概述
使用激光线探针 (LLP) 或 FARO ScanArm 扫描复杂零件表面时,使用最佳实践,效率最高且有助于获得一致的高质量结果。开始项目之前,请观看视频和以下列表了解傻瓜式非接触扫描的可靠经验。
视频
在本视频中,请观看如何应用最佳实践。注意他如何处理 LLP,以及他采取什么样的姿势以获得最精确的结果。
最佳实践
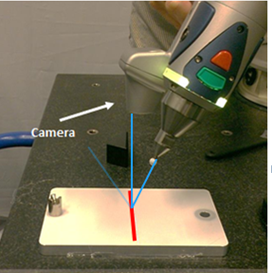
- 正确的 LLP 角度取决于扫描的表面类型。
- 对于非反光或无光表面,激光束的角度应与零件表面垂直。这样相机可捕捉到最多的激光反射光。

- 对于反光表面,激光束应与零件表面成一定角度。使相机 与零件表面垂直可获得最佳角度。这样可以保证噪音反射光不会进入相机。
- 对于非反光或无光表面,激光束的角度应与零件表面垂直。这样相机可捕捉到最多的激光反射光。
- 校准 V3 或 ES LLP 时,先使用正常算法,然后根据表面处理调整高级设置。
- 正常设置适合不太暗的无光表面。曝光会在 0-50 的范围内自动调整。
- 完整适合较暗的无光表面。曝光会在 0 到最大值内自动调整。
- 高反光适合反光表面。曝光会在 0 到最大值之间自动调节,并调整其他设置以更好地管理光泽度。
- 校准 HD LLP 时,先使用自动-正常算法,然后根据表面处理调整设置和滤光片。
- 反光滤光片会移除发光表面生成的数据噪音。
- 自动 HDR算法将标准化暗和亮区域之间的高对比度区域
-
在零件上方移动 LLP 时让 LLP 与零件表面保持一致的距离以减少噪音LLP。与让 LLP 保持较远距离时的远场相比,让 LLP 保持较近距离时有更紧密的点密度。远场噪音增加与激光束到表面再返回相机的距离有关。激光束光程较远时,反射信号不如较近时清晰。这与闪光灯的光束类似。光束较近时,光线看起来较亮而且光束的边缘较清晰。光束较远时,光线看起来就没那么亮而且光束的边缘较弥散。
- 在“设置”对话框中将精度模式设置为高。此设置会过滤掉远场中距离扫描仪较远的点。虽然这会将景深从约 4.5 英寸 (115 mm) 减少到 1.25 英寸 (32 mm),但对无光处理校准表面的测试显示扫描噪音可降低约 50%。 V1、V2、V3 和 ES 设置为高精度模式可提高精度,但对于 HD 型号,这可能会显著降低噪音。
- 在零件表面上移动 LLP 时稳定握住手柄。避免旋转。
- 让零件表面靠近 LLP 而不是远离它。
- 扫描在角上相接的表面时,先扫描一个相邻表面,再扫描另一个。首先让 LLP 与一个表面垂直,完全扫描它,然后停止。然后再让 LLP 与相邻表面垂直,完全扫描它,然后停止。在两个相邻表面的角上移动时不要移动 LLP。
- 扫描时不要过度移动。调整自己的身体、手臂和手,使要扫描的零件舒适地位于您的操作范围内。
- 将您的扫描项目分为几个逻辑部分,使您扫描时可以遵守最佳实践。
另请参阅
关键字:
扫描各角, 扫描复杂的零件, 扫描难件, 握住 LLP, 定向 LLP, LLP 的正常位置