Focus S 系列现场补偿说明
概述
现场补偿流程是一个测试并改善使用 SCENE 软件的扫描仪角度准确度的过程。 注意:现场补偿仅适用于 FocusS 型号。
现场设置
在您开始现场补偿程序之前,确保扫描地点具备以下设施:
- 在现场补偿 (OSC) 过程中,选择一个没有移动或其他人在场的房间或区域。
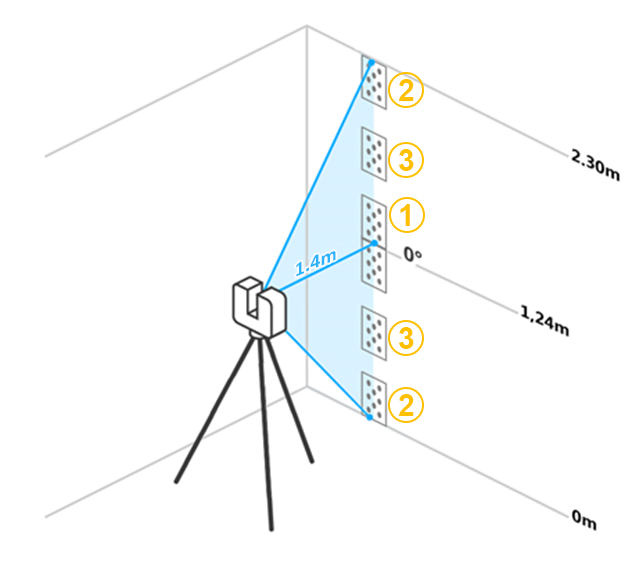
- 必须在扫描现场设置目标页,与激光扫描仪保持约 1.4 米(4.5 英尺)的常规距离。
- 要求房间的最低高度为 2.3 米(7.5 英尺)。
- 没有窗户或其他反射面:如果扫描地点有任何窗户或反射面,目标页上的标记会被反射,由此导致测量结果不准确。
- 照明条件不太重要,因为现场补偿 (OSC) 是通过激光器完成的,不使用视频图像。
打印目标页
如果您需要补偿目标页,您可以 下载并打印,或者从 SCENE 中打印出来。
- 单击“扫描” (Scanning) 功能区。
- 单击“打开目标 PDF” (Open Target PDF)。
- 按照以下准则,使用 DIN/ISO A4 格式或美国字母格式打印至少六份 PDF 文件:
- 需使用激光打印机打印目标,不要使用喷墨打印机。
- 只能在标准的匹配纸上打印,不要使用光面纸或照片纸。
- 打印成品应该是平坦的,没有褶皱或折痕,贴在墙上时应将其放平。
- 我们建议您将目标页粘在合适的刚性背板上,尤其是在室外或有空气流动的地方进行补偿时。
定位激光扫描仪和目标页
- 使用 FARO 三脚架 (ACCSS8032),在三脚架的所有 3 个支脚上仅延长第一节(最大管径)。
- 中柱应完全缩回(最低位置)。这将使扫描镜的中心处于约 1.24 米(4 英尺)的高度。
- 三脚架支脚应完全打开并保持稳定。
- 将扫描仪放在离墙约 1.4 米(4.5 英尺)处。
- 确保将三脚架放置在一个稳定、平坦的表面上。在扫描过程中,三角架不能移动。
- 通过内置的倾角仪调平扫描仪。
|
① 需将两个“中心目标”围绕扫描仪水平轴对称地放置。
所有目标页必须垂直对齐。 在进行现场补偿扫描时,要避开该区域内任何移动的人员或物体。 |
 |
注意:在 SCENE 2021.1 及更高版本中,现场补偿扫描角度减小,从而实现更快的补偿,但必须准确地将扫描仪对准目标。实施这种新的现场补偿时需要使用 FocusS 和 FocusS Plus 扫描仪、Focus 固件 6.8(及更高版本)和 SCENE 2021.1(及更高版本)。
现场补偿
根据 用户手册用 SCENE 进行补偿,执行扫描和校正。
- 在 SCENE 中,将您的电脑与扫描仪相连。
- 单击“扫描” (Scanning) 功能区中的“开始现场补偿” (Start On-Site Compensation) 按钮。
- 选择一个输出文件夹来存储补偿数据。
- 输入激光扫描仪的 IP 地址。
- 您可以轻触扫描仪用户界面上的“管理” (Manage) > “常规设置” (General Settings) > "WLAN" > “IP 地址” (IP Address) 查找 IP 地址。
- 单击“连接” (Connect)。
- 注意验证目标和扫描仪的位置是否满足上述要求。单击“放置目标” (Place Targets)。
- 单击“水平对齐” (Horizontal Alignment)。
- 等待至扫描仪停止旋转。打开快速释放装置,校准扫描仪,使其与墙壁或目标平行。校准后,将快速释放装置锁定。
- 当通过扫描仪的底座(在镜子高度处)进行“瞄准”时,可以实现最佳校准。从这个位置看,“中心目标”必须在镜子的上方和下方可见。
- 单击“扫描和补偿” (Scan & Compensate)。
- 补偿结束后将会显示补偿报告,其中包含补偿的结果。单击“打开报告” (Open Report) 按钮,以 PDF 形式打开补偿报告。
- 日志数据与补偿报告一起存储。(包括所有数据在内大小约为 300 MB)。大部分的数据是扫描数据。压缩磁盘容量时,请确保正确清除这些数据。
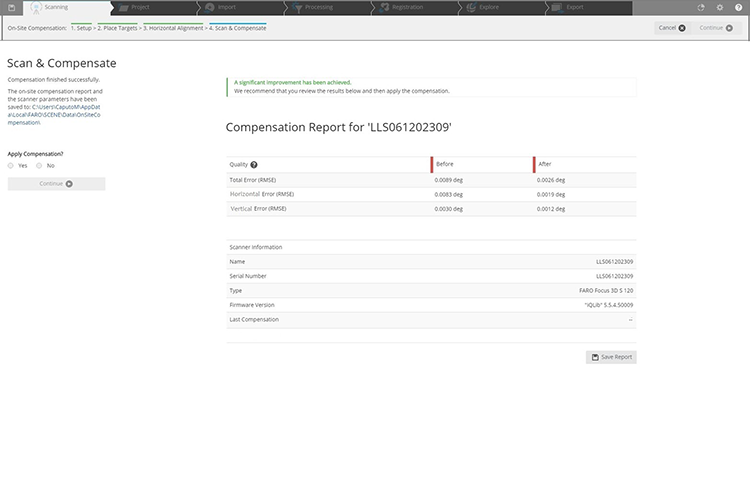
- 如需将此补偿应用到扫描仪,请选择“是” (Yes) 并单击“完成” (Finish)。如果您不希望应用此补偿,请选择“否” (No)。
- 然后就可以断开扫描仪的连接。
故障排除
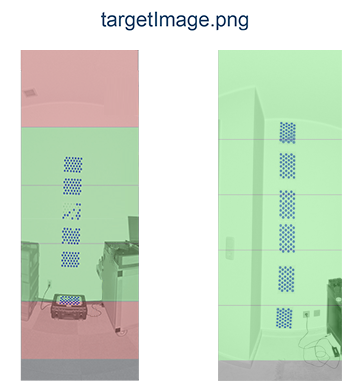
错误:该过程未能识别足够的赔偿对象。
- 解决方法:在输出文件夹中存储了一个 targetImage.png 图像文件。该图像通过蓝色圆圈显示所识别的标记。如果区域内检测到的目标数量足够,则会显示绿色背景。如果检测到的目标数量不足,则会显示红色背景。
错误:无法读取和写选定的数据输出文件夹。
- 解决方法:请确保您对选定的输出文件夹具备读取和写入权限。确保您有足够的磁盘空间。执行现场补偿需要大约 330MB 的空间。
错误:无法确定一致的解决方案。
- 解决方法:确保三角架和目标在操作过程中没有移动。
错误:无法访问扫描仪的 SD 卡。
- 解决方法:确保 SD 卡已经插入,并且没有写入保护,有足够的可用空间(大约 330MB)。
错误:与扫描仪的通信失败。
- 解决方法 1:确保与扫描仪的 WLAN 连接稳定。如果在连接到扫描仪或应用补偿参数时出现该错误,请尝试重复相应的步骤。
- 解决方法 2:如果 Focus 固件版本低于 6.8,并且使用的 SCENE 版本低于 2021.1,则可能需要启用 SMB 1.0 协议。打开“控制面板” (control panel) > “所有控制面板项目” (All control panel Items) > “程序和功能” (Programs and Features) > “打开或关闭 Windows 功能” (Turn Windows features on or off)。进入下一个窗口,在列表中搜索 "SMB 1.0"。勾选方框激活该功能。重新启动您的电脑。
关键字:
现场补偿、无线连接、Wi-Fi、WLAN、目标