使用Measure 10 或 Polyworks 设置和对齐 FaroArm、TrackArm 和 Laser Tracker
概述
FARO TrackArm 是当前市上最灵活的便携式三维测量设备。借助 70 米的范围和高达 12 英尺的探测范围,FARO Laser Tracker 和 FaroArm 的完美结合能够简化最有挑战性的测量,同时提供测量级精度。
快速步骤
要使用 TrackArm 系统,您需要几分钟来设置和配置它。
- 使用专用 TrackArm SMR 设置 FaroArm。Laser Tracker 附件手册 中有含有 SMR 及其附件的 TrackArm 工具包的部件编号。请联系全球 FARO 销售代理商订购 TrackArm 工具包。
- 将 TrackArm、Tracker 和 FaroArm 连接到您的计算机,然后将其打开。
- 补偿 SMR。
- 定义 FaroArm 相对跟踪器的位置或准线。
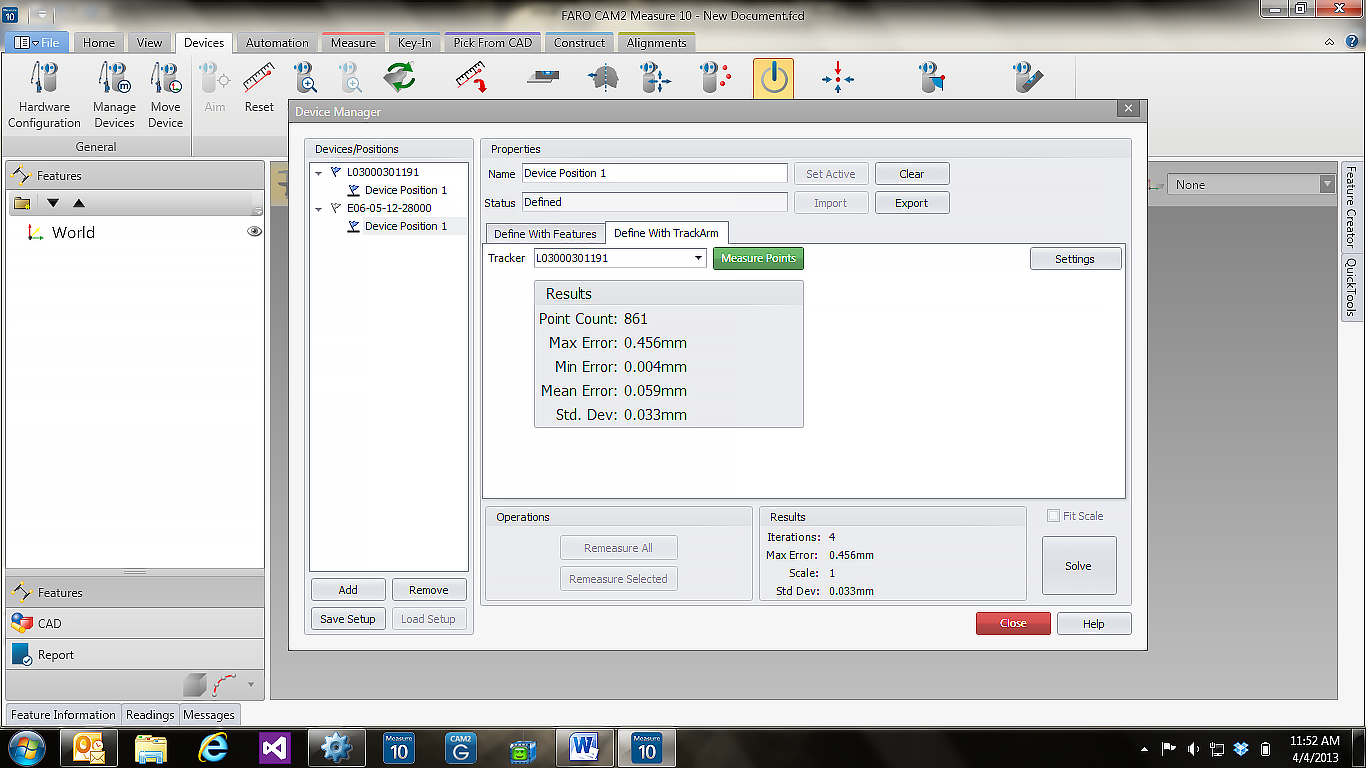
完成步骤 4 后,您可以检查最大值、最小值和平均误差,以及标准 偏差结果。如果结果可以接受,您就完成了。否则,重复步骤 4。
详细资料
Laser Tracker 附件手册的 FARO TrackArm 一章详细说明了如何设置、配置、放置或对准 TrackArm。要查找这些说明,只需下载 Laser Tracker 附件手册,然后在 PDF 文件中搜索 TrackArm。
本文的“另请参阅”部分中还提供了 Measure 10、FaroArm 和 Tracker 的用户手册,以及 Tracker 附件手册的链接供您使用。
提示
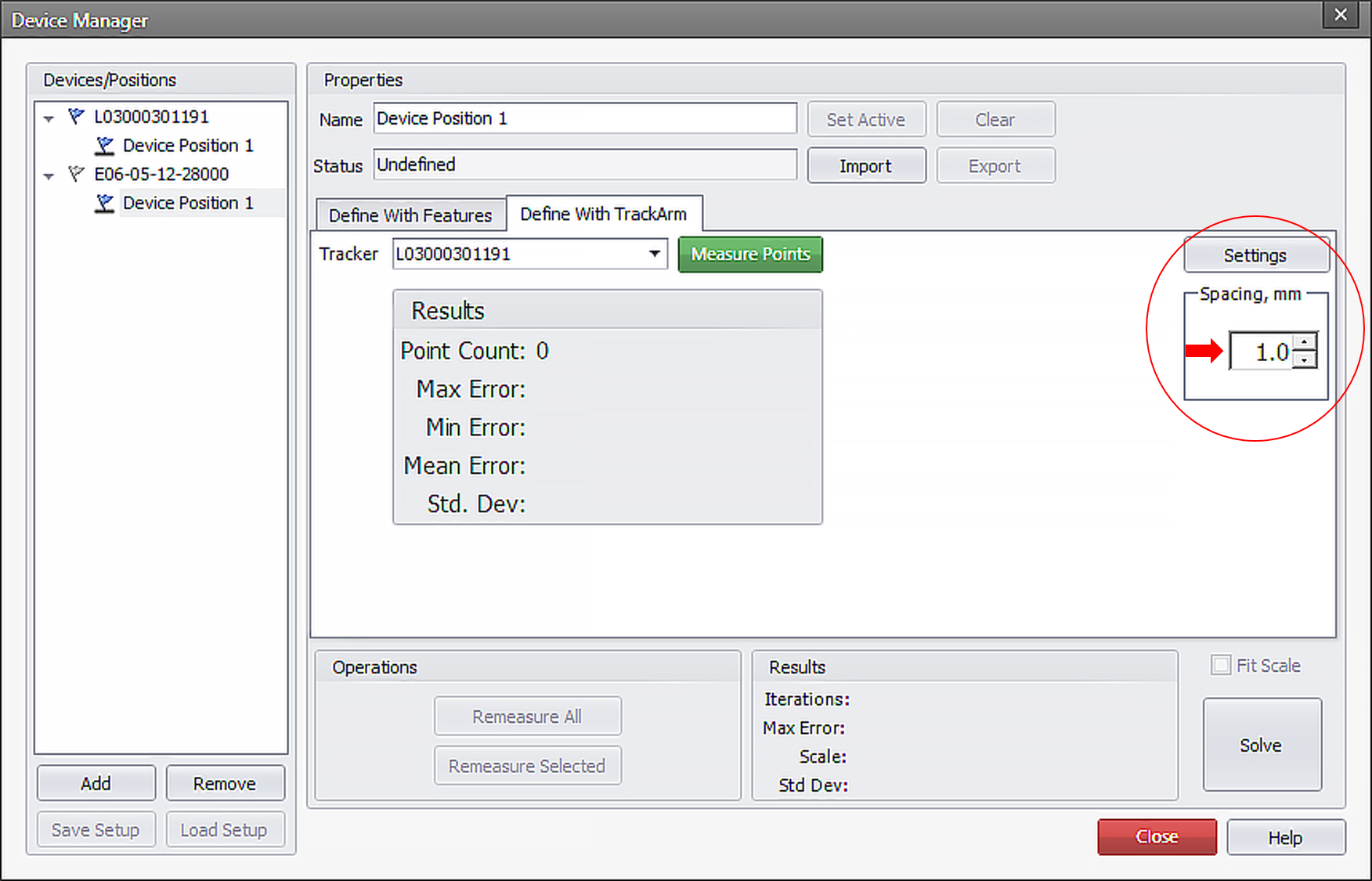
对准 Tracker 和 FaroArm 时,Polyworks 和 Measure 10 中的 TrackArm 设置可能给出不同的结果。差别在于 Polyworks 使用默认扫描点间距 1mm,而 Measure 10 使用默认值 5mm。您可将 Measure 10 设备管理器的设置修改为 1mm 以优化 Measure 和 Polyworks 之间的相关性。
另请参阅
- 在 TrackArm 系统中使用 FARO Laser Tracker 和 FaroArm 会损失多少精度
- 如何获得 FARO Laser Tracker 或 FARO TrackArm 的最佳测量精度
- 我在哪里可以下载 Vantage 和 ION X、Xi 和 Si 最新的 Laser Tracker 附件手册
- 我可以在何处下载 Measure 10 用户手册的最新和早期版本
- FaroArm 、ScanArm 和 Gage 用戶手冊
- 激光跟踪儀用戶手冊
关键字:
对准跟踪器和 faroarm, 标准偏差, 最小误差, 最大误差, 本地化, trackarm 位置