激光扫描仪最佳实践

概述
仔细规划和理解扫描原理对于经济高效地捕获专业精准的扫描至关重要。这些准则有助于处理扫描项目期间遇到的很多常见问题。
现场草图
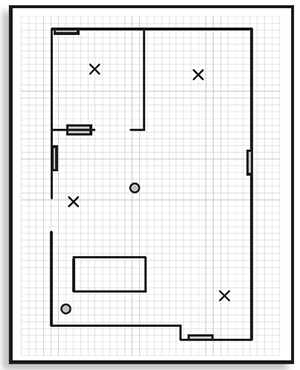
快速绘制扫描现场草图有助于节省时间及确定最佳扫描位置。同时,还能帮助识别可能影响扫描项目的其他物理限制,如障碍物、电源需求及其他设备需求。如果项目现场是已有的室外结构,则打印 Google 地图或其他卫星图像堪称推行组织扫描策略的绝佳方式。

手绘草图也是一种有效手段。
文件命名
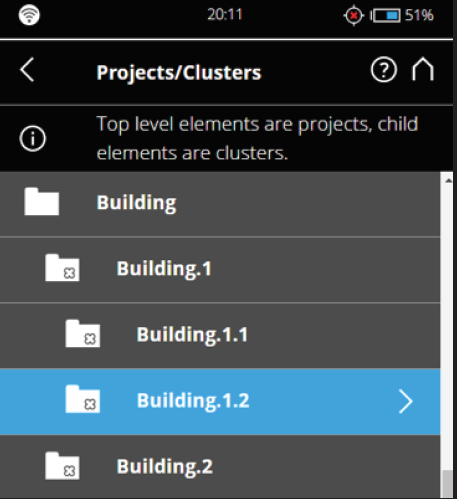
在扫描仪上设置较大的项目时,最好确定可以分组为扫描群集的区域,从而简化拼接过程。您可以在“管理”>“项目/群集”中设置项目和子项目名称。
为每个扫描项目和项目内部文件夹命名并说明含义。例如,案例或工程编号、客户名称或编号、街道位置。多层建筑项目可能采用以下文件结构:
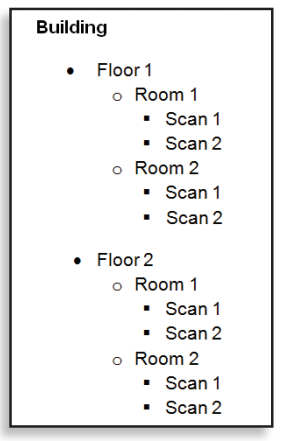
在扫描仪上创建此文件结构的最简单方法是:添加子项目,让扫描仪自动命名各子项目和各扫描。
设备检查
- 检查扫描仪三脚架,确保各支脚牢固锁定,并且连接正确扫描仪。
- 检查扫描仪外部包装是否有任何损坏或变形的迹象。
- 检查扫描镜是否有灰尘、划痕、裂纹和变形。有关清洁激光扫描仪扫描镜的信息,请单击此处。
人工目标
对齐要求扫描位置具有可用于对齐扫描的独特特征(角路标、门、灯柱等)。平坦道路或尖角房间等位置需要人工目标辅助完成扫描对齐过程。
目标球几乎可以放置在任何位置,而且能够从任何角度进行扫描,因而成为百搭选择,适合缺少纸靶附着表面的场地。FARO 球体生产规格严格,非常适合精度要求较高的项目。

棋盘板目标可以根据需要轻松打印、标记和调整大小,但也必须附着于平坦表面并垂直于扫描仪放置。
编码标记功能类似于棋盘板,但包含带有唯一编号的光学条码。这些独特标记有助于确定扫描位置并轻松实现自动对齐。可以从
目标放置
人工目标指南
- 对齐至少需要三个目标。(如果使用倾角仪等传感器数据,则需要两个目标。)
- 排列目标,确保扫描仪到目标清晰视线清晰。
- 确保可以从多个扫描仪位置看到各个目标。
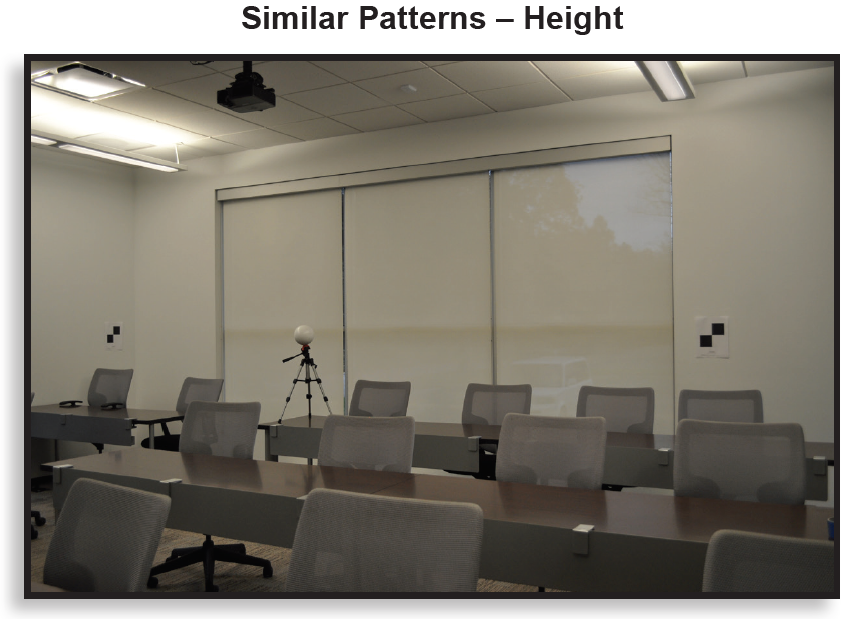
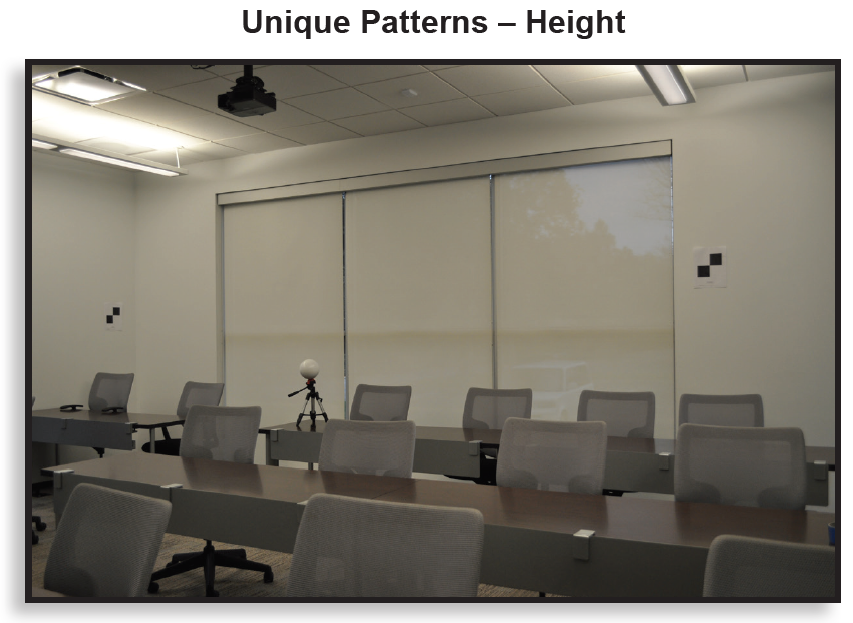
- 改变目标的高度和间距,从三个维度按独特模式排列目标。
- 切勿在扫描过程中移动目标。
另请参阅
电池/延长线
电源需求将因扫描项目类型而异。根据需要适当计划电池充电时间和插座使用。如果扫描仪插入电源插座,扫描过程十分漫长,请考虑使用电源线保护装置,防止因电源线绊倒而造成损坏。


扫描仪位置数
尽量减少扫描仪位置数将可缩短扫描时间,确保充分捕获点数据。使用现场草图确定最佳扫描位置。将扫描仪放置在固定位置,确保每次扫描相互重叠。扫描区域应包含多个唯一自然目标,从而帮助拼接扫描。请记住,可能不一定每次都需要进行完整的 360° 扫描,具体取决于取像对象。务必扫描像门道一类的过渡区域,以便帮助拼接。
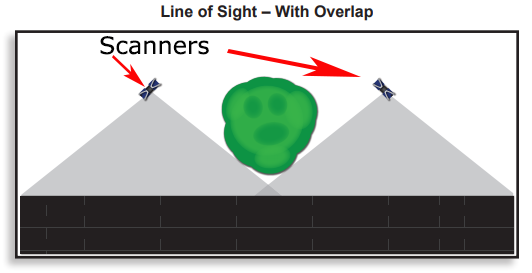
视线
树木或柱形物等障碍物通常需要调整扫描位置,以确保捕获对象周围的所有扫描数据。使用多个扫描或扫描仪时,确保扫描区域越过障碍物重叠。
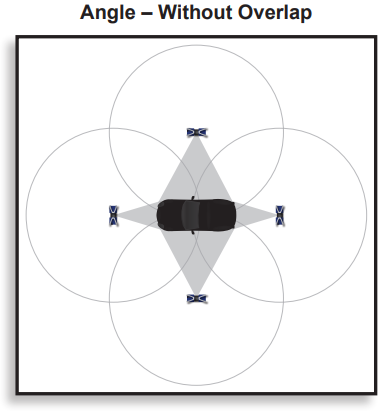
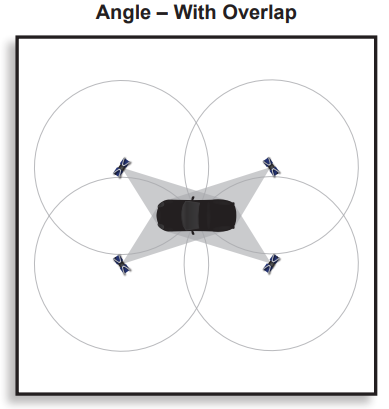
与取像对象的角度
从不同角度捕获多次扫描,提供最完整的 3D 图像。选择合适的角度可以减少所需的扫描次数。将扫描仪与取像对象呈一定角度放置,获取最佳视线,捕获必要细节,并确保扫描涵盖重叠区域。
平分
定位扫描仪时,避免将取像对象或人工目标设置为启动/停止点。开始/停止线或缝隙应面向最低兴趣区域。
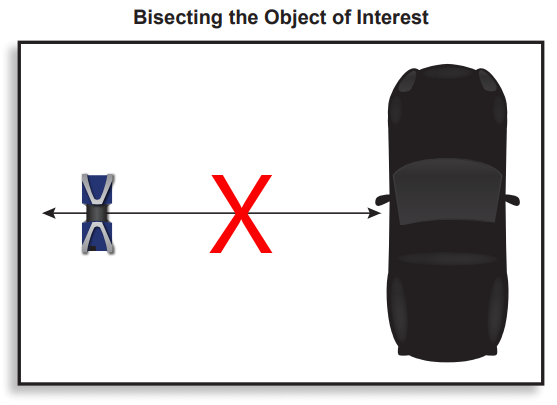
简单的经验法则是:使用位于扫描仪侧面的扫描仪触摸屏时,务必确保面向取像对象。
扫描顺序至关重要
按逻辑顺序扫描可大大简化拼接过程。环绕取像对象或沿结构线性前进可简化跟踪和拼接扫描。在项目区域草图上按顺序扫描的难度越大,后续拼接扫描的难度就越大。
扫描平面
如果关注扫描对象位于移动平面之上,如水上船只,则最好将扫描仪放置于同一移动平面,防止微弱移动影响测量数据。
ScanPlan 和扫描助手
FARO 手持式 2D 扫描仪 ScanPlan 可让您快速绘制建筑物平面图。在 ScanPlan 的扫描助手模式下,将就定位 Focus 扫描仪提出最佳位置建议。有关使用扫描助手的详细信息,请访问本文。
扫描分辨率
扫描分辨率是指收集的数据点数及这些点之间的距离。根据所需的细致程度,到取像对象的距离以及到目标的距离来选择分辨率。
一般分辨率准则
- 1/1 或 1/2 - 对象和小区域
- 1/4 或 1/5 - 室外和大型室内空间
- 1/8 或 1/10 - 室内和小型室外空间
扫描质量
扫描质量是指扫描仪为确认点数据而进行的测量次数。增加此设置可提高扫描精度,但也会延长扫描时间。质量设置还采用降噪,降噪是确定扫描点差异由对象细节还是噪声引起的一种算法。
一般质量准则
- 2X – 最佳条件(照明良好、天气晴朗),需要考虑时间问题
- 3X – 室内或室外阴雨天气
- 4x – 室外阳光明媚(需要范围)或天气恶劣
水平/垂直
此设置可限制扫描仪的扫描区域,允许 180° 扫描或其他小范围扫描。
注意:此设置是永久设置,因此务必在下一次扫描时进行重置。
颜色
如果扫描区域非常暗或需要考虑时间,则关闭颜色可缩短扫描时间。
注意:由于扫描仪的近红外性质且反射/强度值不断变化,原始扫描中的某些表面可能会被洗掉。扫描上色后,这些细节应可见。
测光
- 平均加权:如果照明相对均匀,则非常理想;此设置使用来自整个场景的光线,花费的时间大大缩短。
- 地平线加权:最适合具有明亮顶部照明的场景,摄像头使用来自地平线的光线。
- 天顶加权:最适合视平线或以下发出明亮光线的场景,摄像头使用来自上方的光线信息。
预定义扫描配置文件
确定项目需求最快的方法是使用扫描仪的预定义扫描配置文件。
更新机型: Focus Core、Focus Premium、Focus Premium Max
| 配置文件 | 使用场景 | 分辨率 | 质量 | 颜色 | 传感器 |
|---|---|---|---|---|---|
| 加速 | 室内,扫描仪与感兴趣物体之间的距离小于 10 米 | 1/8 | 3X | 关闭 | 打开 |
| 标准 | 在室内,扫描仪与感兴趣物体之间的距离超过 10 米 | 1/5 | 3X | 关闭 | 打开 |
| 扩展 | 室外,扫描仪与感兴趣物体之间的距离超过 20 米 | 1/4 | 3X | 关闭 | 打开 |
| 对象高清1 | 高分辨率扫描近距离物体 | 1/2 | 4X | 打开 | 打开 |
| 闪光灯2 | 室内,扫描仪与感兴趣物体之间的距离小于 10 米 | 1/43 | 2x | 打开 | 关闭 |
备注1: 物体高清预案使用分辨率为 800 万像素的内置摄像头(只有高分辨率设置使用 1300 万像素)。它还使用近距离范围设置来拍摄较近的物体。
备注2: Flash 配置文件只有在使用 FARO Stream 应用程序并获得有效许可后才能使用。Flash 使用 PanoCam 配件和理光 Theta Z1 以及粗糙、不太精确的倾斜仪读数。
备注3: 1/4 垂直分辨率和 3 转/分(10 秒)水平分辨率
一般信息:
可以自定义和克隆上述预定义配置文件(不适用于 Flash)或创建新配置文件。请使用自定义配置文件进行特定环境扫描。数据流配置文件不会与 Focus 扫描仪同步,以避免多个设备之间发生冲突。
Legacy Models: FocusS, FocusS Plus, FocusM
| 配置文件 | 使用场景 | 分辨率 | 质量 | 颜色 | 传感器 |
|---|---|---|---|---|---|
| 室内 ...10m | 室内,扫描仪与取像对象之间的距离小于 10m | 1/8 | 3X | 打开 | 打开 |
| 室内 10m... | 室内,扫描仪与取像对象之间的距离大于 10m | 1/5 | 4X | 打开 | 打开 |
| 室内 HDR | 室内,扫描仪与对象之间的距离小于 20m 且符合 HDR 质量 | 1/5 | 4X | 打开 | 打开 |
| 室外 ...20m | 室外,扫描仪与取像对象之间的距离小于 20m | 1/5 | 4X | 打开 | 打开 |
| 室外 20m... | 室外,扫描仪与取像对象之间的距离大于 20m | 1/4 | 4X | 打开 | 打开 |
| 室外 HDR | 室外,扫描仪与取像对象之间的距离大于 20m 且符合 HDR 质量 | 1/4 | 4X | 打开 | 打开 |
| 预览 | 快速、低分辨率扫描 | 1/16 | 4X | 关闭 | 关闭 |
| 对象 HD | 高分辨率扫描 | 1/2 | 6X | 打开 | 打开 |
| 室外:远距离 | 扫描仪与取像对象之间的距离大于 20m,并且无需考虑扫描仪附近对象的测量精度。 | 1/4 | 4X | 打开 | 打开 |
可根据需要更改预定义的扫描配置文件,并可添加个性化扫描配置文件以满足个人需要。
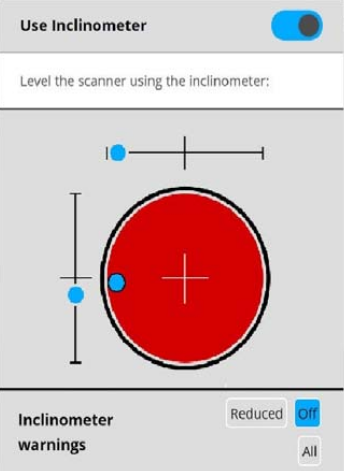
倾角仪
仅当扫描仪的当前倾角超过 2°(图标变为黄色)或扫描仪倾斜超过 5° 图标变为红色时,状态栏  中的倾角警告图标才可见。
中的倾角警告图标才可见。
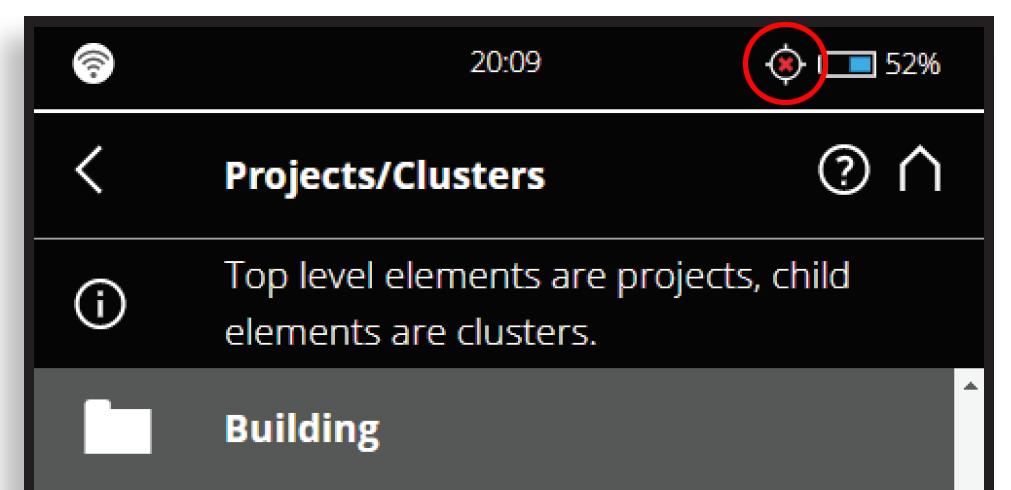
您可以选择主页 > 参数 > 选择传感器调平倾角仪。该视图显示靶心气泡水平倾角仪(以它们安装在扫描仪顶部时的形式显示)。
您可以启用或禁用将倾角仪的倾角测量自动用于 SCENE 扫描拼接的设置。但是,无论您的设置如何,会始终测量此传感器的数据会并将其附加到每个扫描。如果已启用倾角仪数据的使用,则会自动将这些数据用于在 SCENE 中注册扫描;如果禁用,则会忽略这些数据。
如果要颠倒扫描,应关闭倾角仪。
注意:如果在室外或易动表面进行扫描,请在进入下一次扫描之前仔细检查倾角仪气泡。选择管理 > 传感器 > 倾角仪。如果倾角仪位于红色区域,则重新调平扫描仪,检查三脚架支脚是否牢固稳定,然后再次扫描。
恶劣天气
- 雨天 - 降低分辨率,减少扫描液滴数,同时提高质量,确认测量数据。
- 雾天 - 将分辨率提高到 1/4 或 1/3,使用 3x 或 4x 质量。
- 大风 - 降低三脚架高度,使用 8 到 10 磅沙袋稳固三脚架。警告:在大风条件下,请勿将扫描仪随意放在一边无人照看。
- 高温 - 如果在强光直射或 40°C (104°F) 以上温度条件下运行,热保护盖有助于保护扫描仪并延长操作时间。
恶劣表面
- 明亮 – 明亮表面可能导致扫描噪声增加及测量数据丢失。提高扫描质量有助于降低此类表面产生的影响。在更恶劣的条件下,请尝试使用遮蔽胶带或喷漆胶带覆盖表面。
- 反射 – 镜子和其他高反射表面可能增加扫描难度。使用牛皮纸或胶带覆盖此类表面可最大限度地降低影响。
- 玻璃 – 通过玻璃表面进行测量不会产生可重复或准确的结果。除非玻璃表面有非常特殊的涂层,否则背反射会出现并影响径向测量。即使玻璃表面有适当的涂层来防止或减少这种情况,玻璃的折射率与光束穿过的空气的折射率不同。这种折射率的变化会导致径向距离测量的误差,也会导致光束 "弯曲 "或不再从跟踪器到目标的直线路径上行驶。光束的这种弯曲将影响扫描仪的测量结果。弯曲的性质也会随着光束进入玻璃窗的角度变化而变化,从而导致精度和重复性的损失。
- 水– 水会导致光线大幅折射,以致无法获得可靠的扫描结果,应予以避免。
- 高溫表面– FARO掃描儀在紅外光下運行。因此,除了目標溫度以外,最重要的是亮度,或它將發射紅外光譜中的多少光。所有物品都會發出紅外線,並且它們發出的紅外線的數量會隨著溫度的升高而增加。極熱的物品(超過幾百攝氏度)將發出比其反射更多的紅外線。在這些極端溫度下,掃描儀發出的所有激光功率都不太可能會反射並返回。這種情況可能會導致掃描數據丟失和不准確。 一般来说,我们不建议扫描任何温度超过500℃的物体,因为结果是不可预测的。
现场拼接
旧款机型:FocusS、FocusS Plus、FocusM
现场注册支持直接将扫描数据(无论是来自单个扫描还是同时进行的多个扫描)无线传输到现场 PC 并自动对齐。。
新款机型:Focus Core、Focus Premium、Focus Premium Max
建议使用FARO Stream应用程序(可在Google和Apple应用商店获取)进行现场配准,Stream将自动配准新捕获的扫描数据。Stream采用自动俯视图和基于云对云的配准技术。每次扫描完成后,系统会自动执行此自动配准流程。用户亦可在Stream中执行手动配准并添加扫描连接点,这些数据可作为最终处理步骤在SCENE中进行精细配准。
更多详情请参阅Stream手册中“Focus扫描配准”章节。
扫描仪安全
- 注意:请勿将扫描仪随意放在一边无人照看。
- 尽量限制扫描区域流量。
- 沿三脚架支腿缠绕喷漆胶带或将支脚包裹在剪裁成适当尺寸的游泳棒内,使扫描仪位置更明显。
- 如果通过电源线连接扫描仪,请使用电源线保护套盖住电源线。
- 扫描仪移到三脚架上时,始终将一只手放在扫描仪上。
- 如果地面不平整(如沙子、松土或工业残渣),请尝试使用振动抑制垫,将三脚架支脚插入网球,或将支脚置于旧光盘或家具滑块之上。
PanoCam
PanoCam 附件可在一秒钟内捕捉 360° 彩色照片,从而加快扫描过程。
适用于所有 V8 和 V9 Focus 扫描仪:
| 模型 | 高动态范围(HDR) |
|---|---|
| Focus V8 传统: FocusS, FocusS Plus, FocusM | 不详 |
| Focus V9: Focus Core, Focus Premium, Focus Premium Max | 可选设置 |
一般信息:
- 使用 FARO PanoCam 支架(FARO 项目 ACCS-0016)将全景相机安装到 Focus 扫描仪上。仅适用于理光 Theta Z1 相机。使用最新的 Focus 和理光 Theta Z1 相机固件(请参阅 https://support.theta360.com)。
- 注意!在装配理光 Theta Z1 和 PanoCam 底座时,请勿过度拧紧相机螺丝。否则可能导致相机或支架损坏。建议始终使用相同的力度和方法拧紧相机螺丝。更多信息和细节请参阅《Focus 用户手册》。
- 要获得最佳的扫描着色效果,应在组装好 PanoCam 底座和理光 Theta Z1 后执行 PanoCam 校准扫描。为了在 Sphere XG 中处理 PanoCam 扫描,目前需要在上传之前在每个项目中采集 Panocam 校准扫描。
- 建议不时清洁 PanoCam 底座和 Focus 扫描仪的连接器触点。使用棉签和异丙醇。
存储
适用于所有 V8 和 V9 Focus 扫描仪:
| 模型 | 固态硬盘(SSD) |
|---|---|
| Focus V8 传统: FocusS, FocusS Plus, FocusM | 无法使用,只能使用 SD 卡 |
| Focus V9: Focus Core, Focus Premium, Focus Premium Max | 使用内置固态硬盘或 SD 卡运行 |
一般信息:
扫描项目存储在 SSD 或 SD 卡上,具体取决于存储管理中的设置。存储在固态硬盘上的项目可以导出到 SD 卡。强烈建议使用集成的固态硬盘。使用 SD 卡并设置自动 SD 卡同步会延长扫描捕获时间。可以在 "管理">"存储管理 "中查看设置。
注意:项目中的所有扫描必须保存在相同的存储介质上。在扫描项目中,请勿在内部 (SSD) 和 SD 卡存储之间切换。
.