创建一个 Scan Localizer 项目并扫描内部空间

快速步骤
观看“视频”部分中的教程即可快速了解如何开始使用 FARO® Scan Localizer 处理项目。详细信息请参见下面内容。
视频
在这个 2 分钟的 教程中,观看如何使用 FARO® Scan Localizer 和您的手机创建二维映射项目。无法查看视频? 单击此处下载该视频。
在这个 2 分钟的 教程中,观看如何使用 FARO® Scan Localizer、FARO® Laser Scanner Focus 和您移动设备创建三维扫描项目。无法查看视频? 单击此处下载该视频。
概述
在创建扫描项目之前,请先考虑您要扫描的内部空间。将空间分为多个逻辑部分, 决定如何使用 Scan Localizer 在各个部分移动,以及在哪里暂停以拍摄感兴趣的元素的照片。如果做好预定计划后,可以更容易地捕捉您需要的所有详细信息。
准备
请先查看此表再开始以确保成功。
| 完成需要的时间 | 时间取决于内部空间的大小和计划扫描的截面数量。 |
| 所需技能 |
|
| 必备条件 |
|
| 支持的硬件 |
安装了最新固件的 Scan Localizer |
详细资料
这些说明假定您的 Scan Localizer 已连接 到您的 移动设备。
- 从 Scan Localizer 主页上,选择项目类型。
- 如果创建二维地图或平面图时仅使用 Scan Localizer,不使用 Laser Scanner,请选择二维楼面图
- 如果同时使用 Scan Localizer 和 Laser Scanner 创建细致的三维场景文档,请选择三维扫描。
- 输入一个项目名称,然后单击创建项目。
- 显示局部化窗口 ,扫描开始,且扫描图像会显示在局部化窗口中。当您移动 Scan Localizer 时,图像会扩展并累积。 这表示 Scan Localizer 正在采集数据。如果未显示扫描 图像,请在移动设备点击文件夹图标以停止扫描,然后 创建新项目。您应该马上可以看到扫描图像。
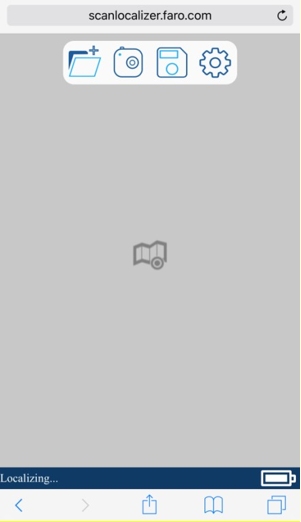
- 将 Scan Localizer 移动到 内部空间中的第一个扫描部分。
- 根据需要暂停并使用移动设备摄像头 拍摄该部分中感兴趣的的特征。在移动设备上的局部化窗口中,点击照相机图标,然后点击扫描图像,以标记要拍摄图片的位置。
- 采集了第一个部分中需要的所有细节后,移至 下一个部分,根据需要拍摄照片,并将其标记在扫描图像上。
- 重复步骤 5 和 6 ,直到扫描完成该空间的所有部分。
- 扫描项目完成后,在移动设备局部化窗口中点击软盘图标以保存扫描项目。项目保存在 Scan Localizer 网络上。
另请参阅
关键字:
点云、gps、建筑平面图、扫描数据